Таблица перевода единиц измерения давления
| Единицы | бар | мм рт.ст. | мм вод.ст. | атм (физич.) | кгс/м2 | кгс/см2 (технич. атм.) | Па | кПа | Мпа |
|---|---|---|---|---|---|---|---|---|---|
| 1 бар | 1 | 750.064 | 10197,16 | 0.986923 | 10.1972 ∙ 103 | 1,01972 | 105 | 100 | 0.1 |
| 1 мм рт.ст. | 1.33322 ∙10-3 | 1 | 13,5951 | 1.31579 ∙10-3 | 13,5951 | 13.5951 ∙10-3 | 133.322 | 133.322 ∙10-3 | 133.322 ∙10-6 |
| 1 мм вод.ст. | 98.0665 ∙10-6 | 73.5561 ∙ 10 -3 | 1 | 96.7841 ∙10-6 | 1 | 0.1∙10-3 | 9.80665 | 9.80665 ∙10-3 | 9.80665 ∙10-6 |
| 1 атм | 1.01325 | 760 | 10.3323 ∙103 | 1 | 10.3323∙ 103 | 1.03323 | 101.325 ∙ 103 | 101.325 | 101.325 ∙10-3 |
| 1 кгс/м2 | 98,0665 ∙10-6 | 73.5561 ∙ 10 -3 | 1 | 96.7841 ∙10-6 | 1 | 0.1∙10-3 | 9.80665 | 9.80665 ∙10 -3 | 9.80665 ∙10-6 |
| 1 кгс/см2 | 0,980665 | 735.561 | 10000 | 0.967841 | 10000 | 1 | 98.0665 ∙ 103 | 98.0665 | 98.0665 ∙10-3 |
| 1 Па | 10 -5 | 7.50064 ∙10-3 | 0,1019716 | 9.86923 ∙10-6 | 101.972 ∙ 10-3 | 10.1972 ∙10-6 | 1 | 10 -3 | 10 -6 |
| 1 кПа | 0.01 | 7.50064 | 101,9716 | 9.86923 ∙10-3 | 101.972 | 10.1972 ∙10-3 | 103 | 1 | 10 -3 |
| 1 МПа | 10 | 7.50064 ∙103 | 101971,6 | 9.86923 | 101.972 ∙103 | 10.1972 | 106 | 103 | 1 |
К системе СИ относятся: Инженерные единицы:
Бар
1 бар = 0,1 Мпа 1 мм рт.ст. = 13.6 мм вод.ст.
1 бар = 10197.16 кгс/м2 1 мм вод.ст. = 0.0001кгс/см2
1 бар = 10 Н/см2 1 мм вод.ст. = 1 кгс/м2
1 атм = 101.325 ∙ 103 Па
Па
1 Па = 1000МПа
1 МПа = 7500 мм. рт. ст.
1 МПа = 106 Н/м2
")
")
Алгоритмы компенсации дополнительной температурной погрешности в кварцевых преобразователях давления и температуры
 Особенностью кварцевых манометрических резонаторов является воспроизводимость температурно-частотной характеристики (ТЧХ), которую необходимо компенсировать с высокой точностью, в широком диапазоне температур и во всем диапазоне рабочих давлений. Для этого необходимо учитывать изменение температурной чувствительности резонатора от давления, воздействующего на него. Ниже описаны два способа температурной компенсации.
Особенностью кварцевых манометрических резонаторов является воспроизводимость температурно-частотной характеристики (ТЧХ), которую необходимо компенсировать с высокой точностью, в широком диапазоне температур и во всем диапазоне рабочих давлений. Для этого необходимо учитывать изменение температурной чувствительности резонатора от давления, воздействующего на него. Ниже описаны два способа температурной компенсации.
Алгоритм №1
Наилучший способ – это вычисление давления по регрессионной функции от двух факторов: давления и температуры. Ниже приведены две функции, степени которых и связи факторов достаточны для проведения расчетов давления с требуемой высокой точностью.
Рекомендуется применять для преобразователей с допустимой дополнительной погрешностью во всем рабочем температурном диапазоне от 0,03% до 0,15 %.
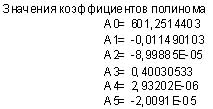
Регрессионная функция представлена полиномом следующего вида:
| P=A0+A1(F(t)-F(t0))+A2(F(t)-F(t0))2+A3(F(p)-F(p0))+A4(F(p)-F(p0))2+A5(F(t)-F(t0))x(F(p)-F(p0)) |
или
| Р= A0+A1(F(t)-F(t0))+A2(F(t)-F(t0))2+A3(F(p)-F(p0))+A4(F(p)-F(p0))2+A5(F(t)-F(t0)) x (F(p)-F(p0))+ A6(F(t)-F(t0))2 x (F(p)-F(p0))+A7(F(t)-F(t0)) x (F(p)-F(p0))2+ A8(F(t)-F(t0))2 x (F(p)-F(p0))2 |
, где
F(t) -частота с температурного канала;
F(t0) -постоянная составляющая температурного канала;
F(p) -частота с канала давления;
F(p0) -постоянная составляющая канала давления;
А0…А8 -коэффициенты регрессионной функции
Пример протокола калибровки преобразователя.
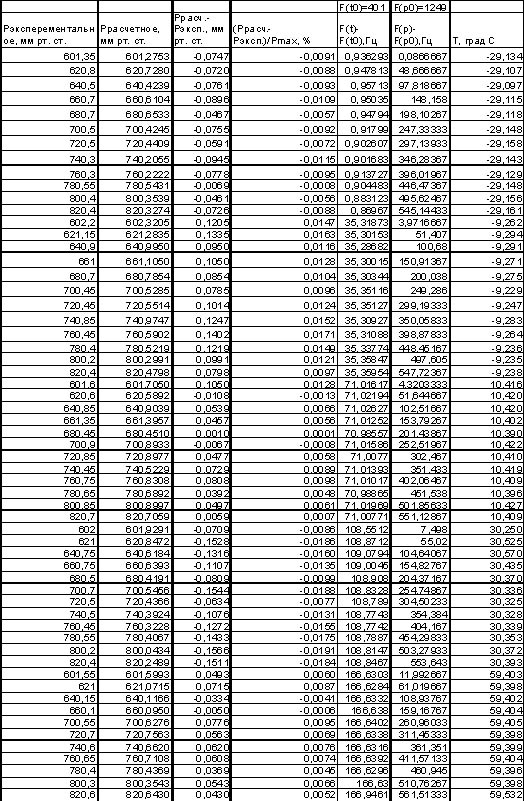
Алгоритм №2
Так как у кварцевых манометрических резонаторов зависимость изменения частоты от температуры значительно меньше, чем у полупроводниковых чувствителых элементов, для задач, где узкий рабочий диапазон температур ( до + 30 °С), рабочий диапазон давлений составляет не более 60 % от верхнего предела давлений и допустима дополнительная температурная погрешность от 0,1% (в рабочем диапазоне температур). Можно пренебречь фактором изменения угла наклона БЧХ в зависимости от температуры и считать что БЧХ смещается параллельно. Алгоритм вычисления давления с компенсацией дополнительной температурной погрешности приведен ниже.
В частности, такой способ компенсации температурной погрешности предлагается для преобразователей ПДТК-0,1-2Р в пластмассовых не герметичных корпусах, благодаря чему они имеют более низкую стоимость по сравнению с преобразователями в герметичном металлическом корпусе.
Алгоритм и формулы для вычисления давления
1. Для температуры:
| T=T0+B1(F(t)-F0(t))+B2(F(t)- F0(t))2+B3(F(t)- F0(t))3 [1], |
где
-Т0 это температура, при которой датчик температуры выдает частоту F(t)0;
-B1, B2, B3 – коэффициенты аппроксимации функции Т(f)0.
2. Для датчика давления:
| Р=Р0+A1(Fтк-F0(p))+A2(Fтк- F0(p))2+A3(Fтк- F0(p))3 [2], |
где:
- Р0 это давление, при котором датчик давления выдает частоту F0(p) при температуре Т0
- A1, A2, A3 - коэффициенты аппроксимации функции Р(f) ;
Fтк= F(p) - Δf [3],
где Fтк - частота с датчика давления, с температурной компенсацией;
F(p)-частота измеренная с датчика давления, без температурной компенсации;
Δf - поправка, компенсирующая уход частоты датчика давления под воздействием температуры, Гц
Δf = k1(Т-Т0)+k2(Т-Т0)2 [4],
где
Т- температура, при которой производится измерение давления F(p), которая вычисляется по формуле [1];
Т0- температура, при которой отсутствует температурная поправка (Fтк=F(p)), при которой была снята БЧХ (указывается в паспорте);
k1, k2– коэфф. аппроксимации функции Fр(t) БТХ определенные в интервале рабочих температур.
Общая формула вычисления давления с температурной компенсацией:
| Р=Р0+A1[F(p) – (k1(Т-Т0)+k2(Т-Т0)2) - F0(p)]+A2[F(p) – ( k1(Т-Т0)+k2(Т-Т0)2) - F0(p)]2+A3[F(p) – ( k1(Т-Т0)+k2(Т-Т0)2) - F0(p)]3 |
Примечание. Использование 1-го алгоритма по сравнению со 2-м является более точным и позволяет производить компенсацию в широком диапазоне давлений и температур. Но калибровка для 1-го алгоритма более трудоемкая и дорогостоящая, чем калибровка для 2-го алгоритма, т.к. необходимо условие герметичности корпуса преобразователя или объема, плюс фактическое количество точек при калибровке для 1-го алгоритма больше чем при калибровке для 2-го алгоритма.